Biography
Hey! I am a PhD Student at the Centre for Cognitive Science at the Technical University of Darmstadt. After collecting technical experience in Information Systems Engineering and Computer Science, I decided to put these skills into action in the domain of Cognitive Science. My research interests include computational (Bayesian) modeling, inverse decision-making in human behavior, as well as (the interplay of) perception & action. I am always eager to learn about new methods from Machine Learning and how they can be used to improve our understanding of human behavior or vice versa can be improved by our knowledge of human cognition.
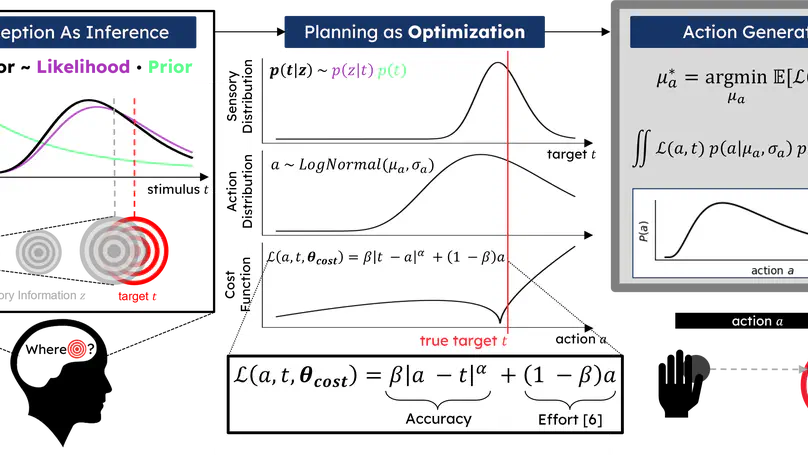
My Master’s Thesis on the inference of cost functions in continuous decision-making was supported by the research cluster “The Adaptive Mind” by the Hessian Ministry of Higher Education, Research, Science and the Arts.
Besides my academic interests, I am also a team leader at Engineers Without Borders Darmstadt and have always been dedicated and committed to sustainability.
- Computational Modeling
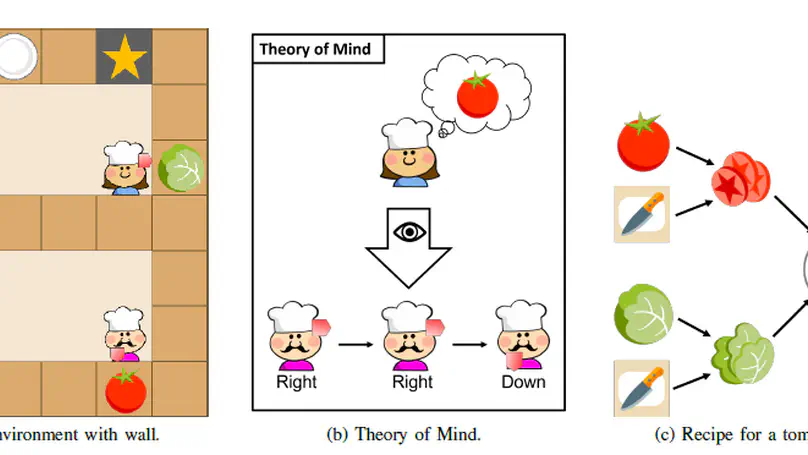
- Inverse Decision-Making
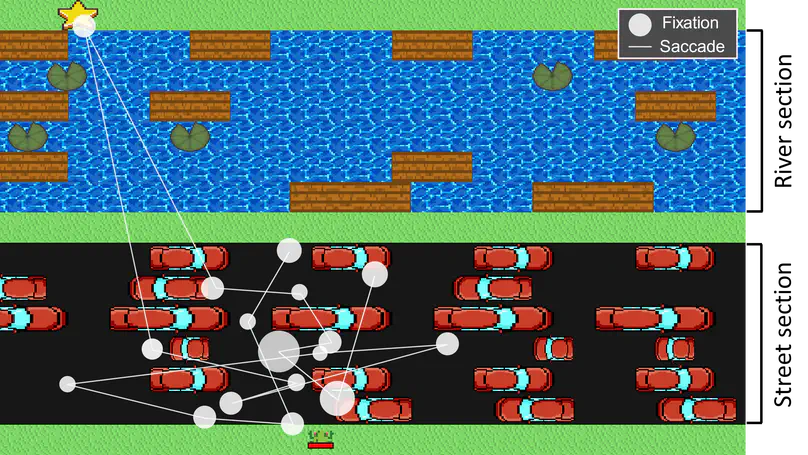
- Perception and Action
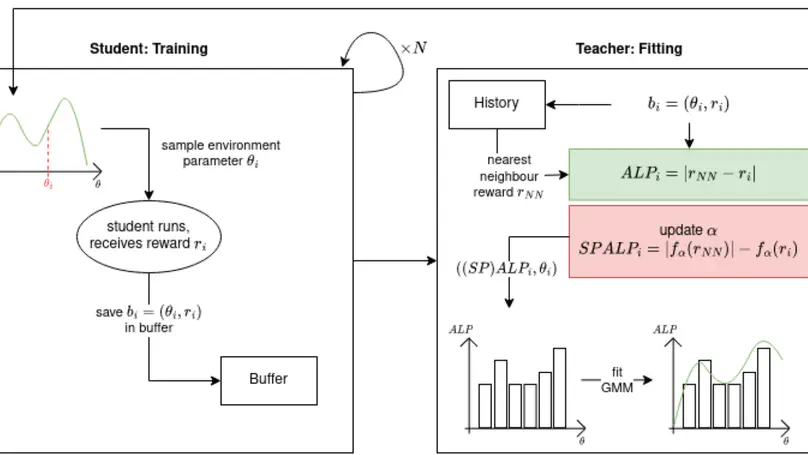
- Machine Learning
PhD in Cognitive Science, Since 2024
Centre of Cognitive Science, Technical University of Darmstadt
M.Sc. in Autonomous Systems, 2024
Technical University of Darmstadt
B.Sc. in Cognitive Science, 2022
Technical University of Darmstadt
B.Sc. in Information Systems Engineering, 2020
Technical University of Darmstadt
Skills
Projects
Scholarships
Scholarship issued for my Master’s thesis Approximate Bayesian Inference of Parametric Cost Functions in Continuous Decision-Making by the research cluster ‘The Adaptive Mind’, funded by the Hessian Ministry of Higher Education, Research, Science and the Arts. The Adaptive Mind focuses research regarding the mechanisms behind human cognition that allow us to quickly adapt to our uncertain and rapidly changing world.

Experience
Responsibilities include:
- Conducting Experiments
- Analysing Data
- Modelling of Human Behavior
Regarding human perception, especially the domain of active vision.
Teaching groups of students in the subjects
- Logic Design
- Mathematics (Statistics and Numerical Methods)
Also creating the exercises for the subject and correcting exams.